WORUM GEHT ES
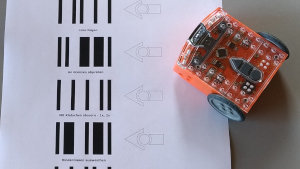
Der Roboter Edison besitzt sechs interne Programme. Du rufst sie auf, indem du mit dem Edison über spezielle Strichcodes (engl. barcodes) fährst. Wir stellen dir hier fünf Programme zum “Machen” vor.
Beim Machen lernst du ein paar technische Funktionen des Edison kennen. Zum Beispiel zeigt dir Edison mit dem Programm “An Grenzen abprallen”, dass er mit LED und Licht-Sensor einen hellen von einem dunklen Untergrund unterscheiden kann. Wir erklären dir zu jedem Programm, wie es funktioniert. So lernst du den Edison-Roboter besser kennen.
Die erforderlichen Barcodes kannst du mit unserem Dokument Edison Barcodes TOP 5 ausdrucken.
Hilfreiche Dokumente des Herstellers findest du hier:
- https://meetedison.com/content/EdBooks/German/EdBook1-Abenteuer-mit-Robotern-Du-bist-ein-Steuermann.pdf
- https://meetedison.com/content/Edison-robot-barcodes.pdf.
DAS BRAUCHST DU

- 1 Edison Roboter
- Edison Barcodes TOP 5 oder https://meetedison.com/content/Edison-robot-barcodes.pdf
- Drucker zum Ausdrucken der Barcodes
MACHEN
So liest du den Barcode ein (siehe unser Video oben):
- Stell Edison rechts vom Barcode hin, so dass der Barcode vor ihm liegt.
- Drück die runde Programmier-Taste 3x
- Edison fährt ein Stück vorwärts und liest den Barcode ein
Um eingelesene Programme auszuführen, stellst du den Edison auf eine ebene Fläche und drückst die dreieckige Start-Taste. Zum Stoppen von Programmen drückst du die rechteckige Stopp-Taste.

Verwende möglichst neue Batterien. Wenn die Spannung in den Batterien zu gering ist, liest der Edison den Barcode nicht ein.
Am besten funktioniert der Lichtsensor, wenn der Raum leicht abgedunkelt ist. Vermeide direkte Sonneneinstrahlung!
PROGRAMM 1 – EINER LINIE FOLGEN
- In dem Programm “Einer Linie folgen” (engl. line tracking) verwendet Edison den Licht-Sensor auf der Unterseite. Er strahlt mit seiner roten LED den Boden an und der Lichtsensor stellt fest, ob viel oder wenig Licht vom Boden reflektiert wird. Ein heller Untergrund reflektiert viel und ein dunkler Untergrund wenig Licht. Auf hellem Untergrund fährt Edison in einem Bogen nach rechts vorne. Trifft er dann auf dunklen Untergrund, so fährt er in einem Bogen nach links vorne. So “wackelt” Edison ständig entlang der schwarzen Linie von rechts nach links vorwärts. Das Programm wird beendet, wenn Edison den Untergrund nicht erkennt oder durch Drücken der rechteckigen Stopp-Taste.
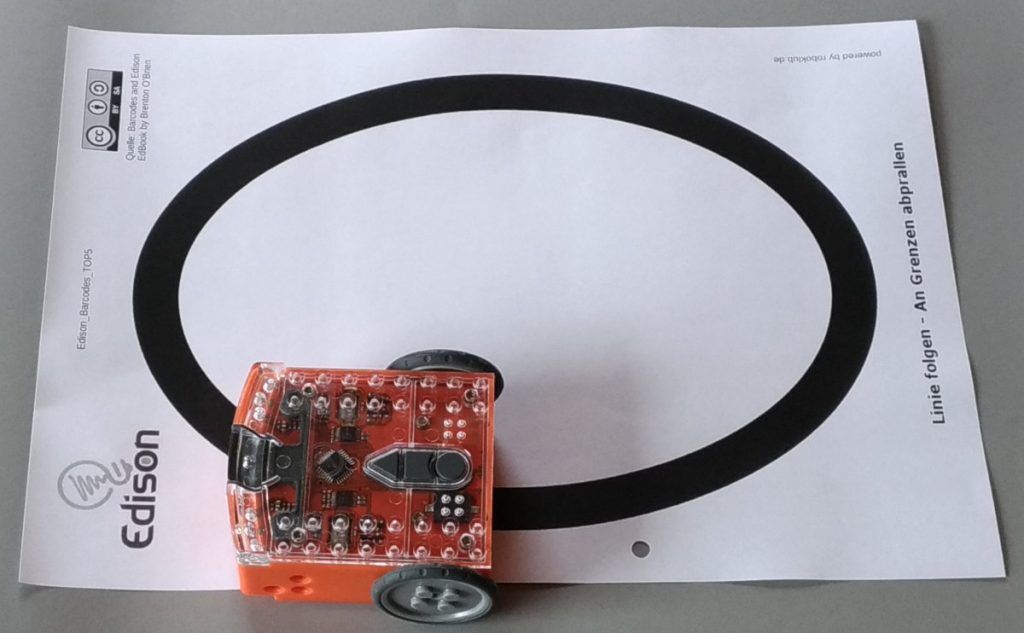
PROGRAMM 2 – AN GRENZEN ABPRALLEN
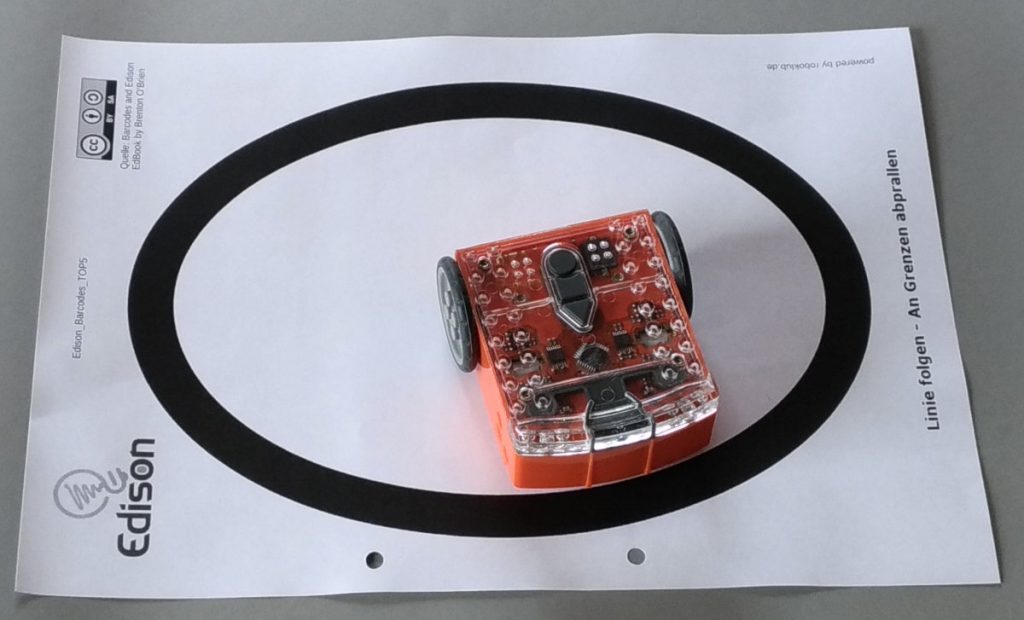
- Auch in dem Programm “An Grenzen abprallen” (engl. bounce in borders) verwendet Edison den Licht-Sensor auf der Unterseite. Er fährt solang vorwärts, wie der Untergrund hell ist. Deshalb startest du Edison auf hellem Untergrund innerhalb einer Umrandung. Wenn der Untergrund dunkel wird (z.B. ein dicker Strich), fährt Edison kurz rückwärts, dreht sich und fährt wieder vorwärts. Das Programm wird beendet, wenn Edison den Untergrund nicht erkennt oder durch Drücken der rechteckigen Stopp-Taste.
PROGRAMM 3 – HINDERNISSE UMFAHREN
- Für das Programm “Hindernisse umfahren” (engl. avoid obstacles) benutzt Edison seine beiden Infrarot-LEDs (IR-LEDs) und den Infrarot-Empfänger (IR-Empfänger) auf der Vorderseite. Die IR-LEDs senden unsichtbares Infrarotlicht aus. Wird das IR-Licht von einem Hindernis reflektiert, erkennt der Edison mit seinem IR-Empfänger, ob sich das Hindernis rechts oder links befindet. Hat Edison beim Vorwärtsfahren ein Hindernis entdeckt, fährt er kurz rückwärts und dreht etwas nach rechts oder links, je nachdem wo das Hindernis steht. Dann beginnt er wieder mit seiner Vorwärtsfahrt. Zum Stoppen des Programms drückst du die rechteckige Stopp-Taste.
PROGRAMM 4 – EINER LAMPE FOLGEN
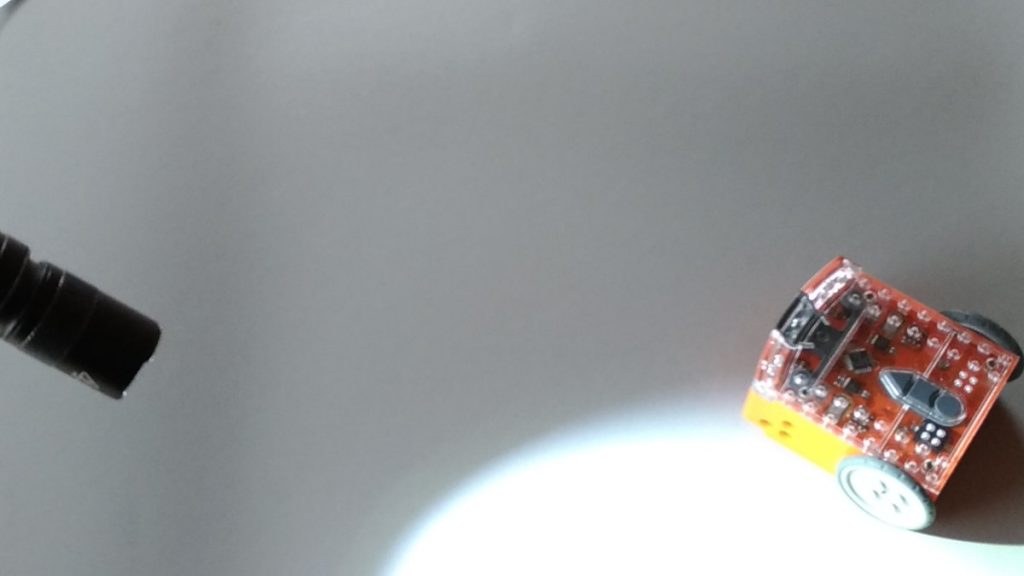
- Das Programm “Einer Lampe folgen” (engl. follow a torch) startest du am besten in einem abgedunkelten Raum. Edison setzt nämlich seine beiden Lichtsensoren ein, um die hellste Lichtquelle im Raum zu finden. Befindet sich die Lichtquelle rechts, dann steuert Edison nach rechts, andernfalls steuert er nach links. So fährt der Roboter immer genau auf die Lichtquelle zu. Du stoppst das Programm mit der rechteckigen Stopp-Taste.
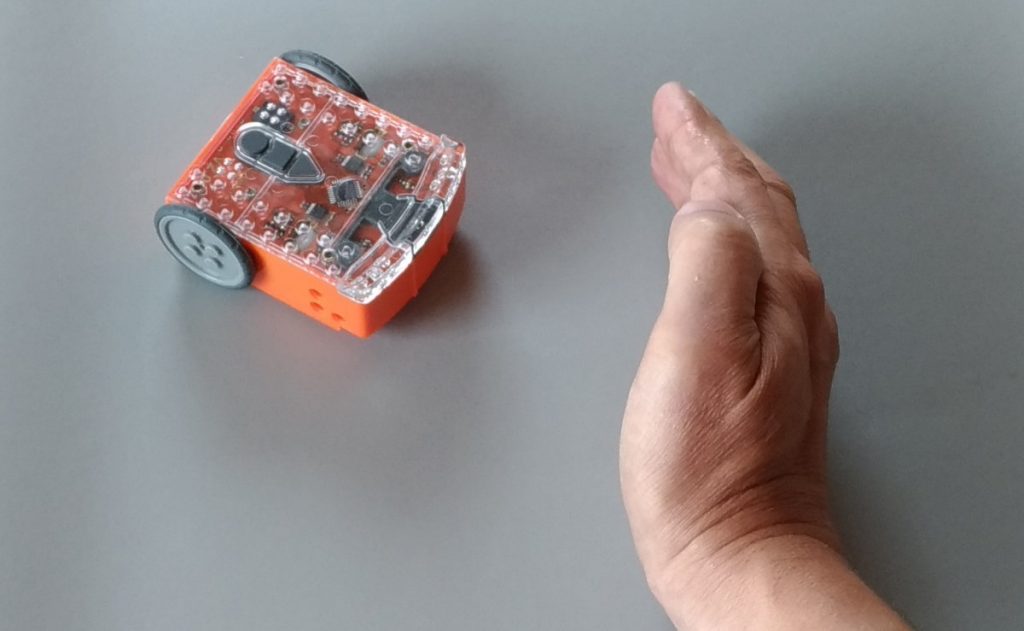
PROGRAMM 5 – FAHRT MIT KLATSCHEN STEUERN
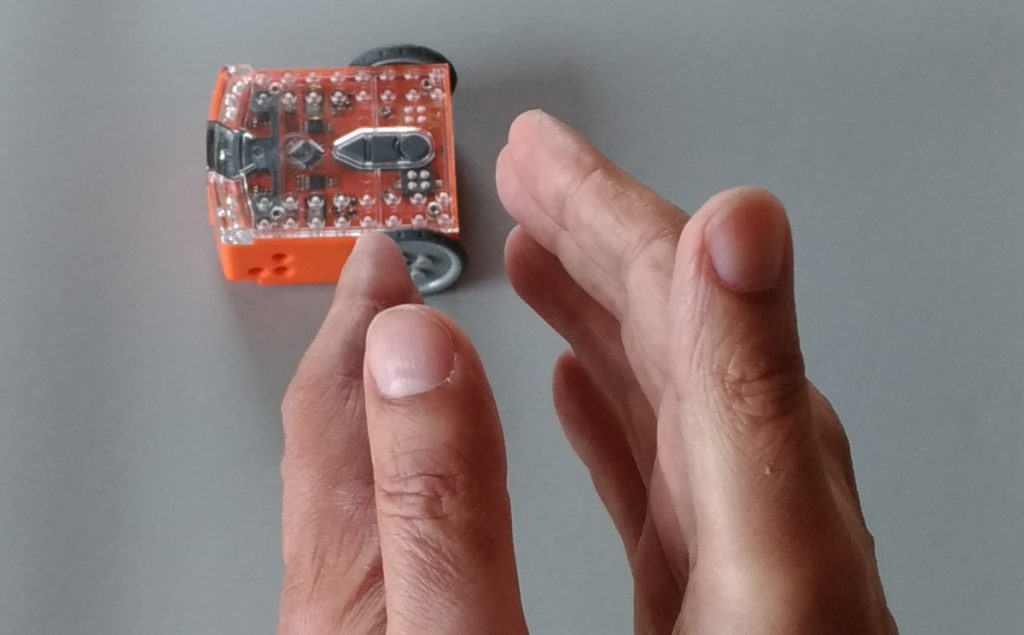
- Den Klatschsensor verwendet Edison im Programm “Fahrt mit Klatschen steuern” (engl. clap controlled driving). Der Klatschsensor ist ein Piezo-Element, das den ansteigenden Luftdruck beim Klatschen (oder Tippen auf das Piezo-Element) feststellt. Beim einmaligen Klatschen dreht Edison nach rechts. Stellt Edison fest, dass in einem bestimmten Zeitabstand (0,2 Sekunden) zweimal geklatscht wurde, fährt Edison ca. 30 cm vorwärts. Zum Stoppen des Programms drückst du die rechteckige Stopp-Taste.
Falls du zwei Edison Roboter zur Verfügung hast, kannst du das Programm “Ringkampf” (engl. sumo wrestle) ausprobieren. Bei diesem Programm fahren zwei Edison auf einer Fläche, die durch eine dicke schwarze Linie begrenzt wird. Wenn Sie den anderen Edison als Hindernis erkennen, fahren sie auf das Hindernis zu und versuchen, den anderen Edison aus dem Ring zu schieben. Dieses Programm kombiniert die Funktionen aus “An Grenzen abprallen” und “Hindernisse umfahren”.
Was du in diesem Projekt lernen kannst:
- Edison hat sechs interne Programme und jedes dieser Programme ist einem bestimmten Barcode zugeordnet. Wir haben dir hier fünf Programme vorgestellt.
- Zum Aufrufen eines Programms lässt du Edison über den Barcode fahren, indem du dreimal die runde Programmier-Taste drückst. Mit der dreieckigen Start-Taste startest du das Programm, mit der rechteckigen Stopp-Taste stoppst du die Ausführung.
- Mit der roten LED und dem Lichtsensor auf der Unterseite kann Edison einen hellen von einem dunklen Untergrund unterscheiden. Ein heller Untergrund reflektiert viel und ein dunkler Untergrund wenig Licht. So kann Edison Barcodes lesen und eine dunkle Linie erkennen.
- Mit den IR-LEDs und dem IR-Sensor an der Vorderseite kann Edison Hindernisse erkennen. Hindernisse reflektieren die IR-Signale und Edison kann feststellen, ob sich ein Hindernis rechts oder links befindet.
- Durch seinen Klatsch-Sensor (Piezo-Element) kann der Edison Klatschgeräusche erkennen. Das Piezo-Element reagiert auf den steigenden Luftdruck, der beim Klatschen entsteht.
