DAS PROJEKT
In diesem Projekt wirst du den Edison mit deinem Programm über einen Parcours steuern. Aber er soll wie ein Auto im Straßenverkehr fahren. Das heißt, vor jedem Abbiegen soll der Roboter blinken!
DEINE MISSION
Beginne damit, ein EdScratch-Programm für das Blinken des Roboters zu erstellen. Die Befehle für das An und Aus der LEDs findest du unter Kategorie “LEDs”.
Deine Tätigkeiten:
- Erstelle mit EdScratch ein Programm, mit dem der Roboter dreimal mit der linken LED blinkt.
- Das Blinken soll deutlich zu sehen sein (kein kurzes Flackern).
- Schaue dir dein Programm an und prüfe, ob du es vereinfachen kannst. Vielleicht kannst du für Wiederholungen die Kontrollstruktur “Schleife” (auf dem Block steht “repeat” für wiederholen) einsetzen.
Unser Roboter blinkt mit diesem Programm dreimal:
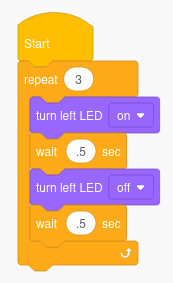
Hinweise zu den Blöcken:
- Mit Block “Turn left LED on” schaltest du die LED ein.
- Nimm den gleichen Block nochmal und klicke auf den Pfeil. Mit Klick auf “off” gibst du den Befehl für das Ausschalten.
- Du könntest die Aktionen für An und Aus jetzt insgesamt dreimal hintereinander mit Befehlsblöcken zusammensetzen. Einfacher ist es, dieses Wiederholen von Befehlen in einer sogenannten Schleife abzubilden. Die Schleife ist wie der Befehl “mache alles x-mal”. Wir verwenden das Klammer-Symbol “repeat” (wiederholen) unterhalb Kategorie “Control” (Kontrollstruktur). Trage den Wert 3 für 3 Wiederholungen ein. Jetzt werden alle Anweisungen, die innerhalb der Klammer sind, dreimal wiederholt.
- Ebenfalls aus der Kategorie “Control” setzen wir den Befehl “wait” (warten) ein. Wenn du diesen Befehl nicht einsetzt, wird das An und Aus der LEDs so schnell durchlaufen, dass du das Blinken gar nicht sehen kannst. Wir haben den Wert 0,5 Sekunden gewählt.

Falls du unsicher bist, wie du Programme erstellst und auf Edison lädst, siehe unser Video auf der Seite EDISON – PROGRAMMIEREN MIT EDSCRATCH. Dein Edison fährt nicht gerade, sondern in einem Bogen? Dann schaue auf unsere Seite EDISON – MOTOREN/HINDERNISERKENNUNG EINSTELLEN..
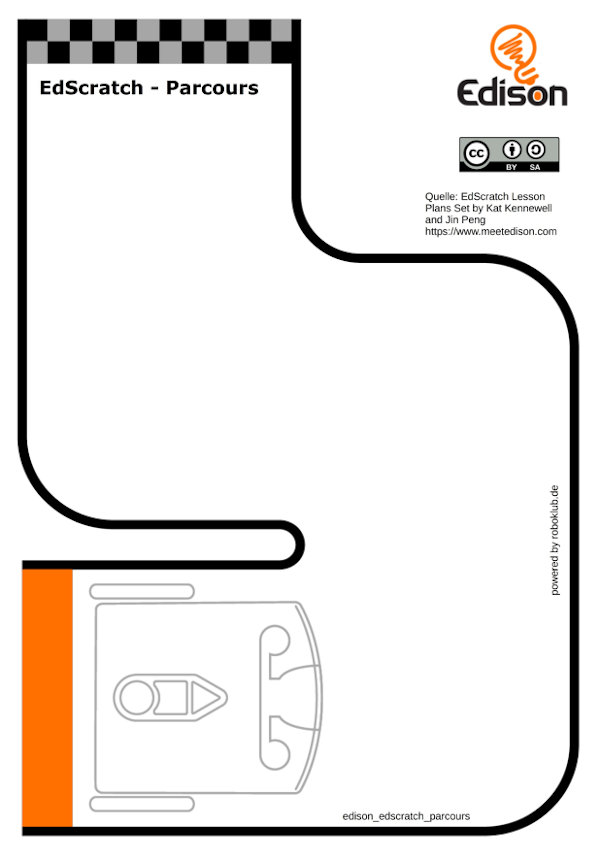
Mit dem nächsten Programm lässt du deinen Roboter durch einen Parcours fahren. Edison soll von der eingezeichneten Position aus starten und über die Ziellinie am Ende der Kurses fahren. Die Fahrgeschwindigkeit soll auf “langsam” eingestellt sein. Zum Programmieren benötigst du Symbole aus der Kategorie Drive (Fahren).
Deine Tätigkeiten:
- Lade durch einen Klick oben auf die Grafik oder hier auf PDF das Dokument “Edison Parcours” herunter und drucke es aus.
- Erstelle mit EdScratch das Programm mit dem der Parcours abgefahren werden soll und lade es auf den Edison.
- Stelle deinen Edison auf die ausgedruckte Grafik und prüfe, ob er den Kurs abfährt.
- Wie drehen sich die Räder beim Befehl “spin left”?
- Schaue dir dein Programm an und prüfe, ob du es vereinfachen kannst.
Zuerst haben wir die einzelnen Fahraktionen nacheinander (sequentiell) angeordnet.
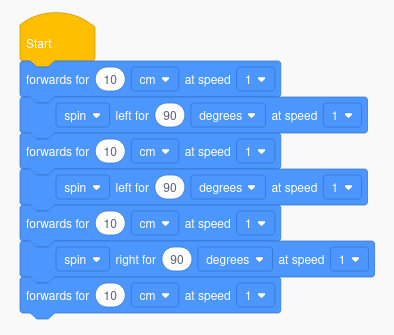
Hinweise zu den Blöcken:
- Den Block “forwards for” (vorwärts für) wählen wir für die Vorwärtsfahrt. Wir geben 10 cm für die Wegstrecke ein. Die Geschwindigkeit stellen wir mit 1 auf langsam ein.
- Mit Block “spin left” geben wir den Befehl für ein Drehen auf der Stelle nach links. Der Roboter soll sich um 90 Grad (degrees) drehen. Die Geschwindigkeit wird wieder auf 1 = langsam eingestellt.
- Der Block “spin right” funktioniert genauso, nur zur rechten Seite.
- Beim Befehl “spin left” dreht das rechte Rad vorwärts und das linke Rad rückwärts. Dadurch dreht sich der Roboter auf der Stelle nach links.
Die beiden Aktionen “Vorwärtsfahrt” und “Drehung nach links” werden zweimal durchlaufen. Deshalb setzen wir hier eine Schleife ein:
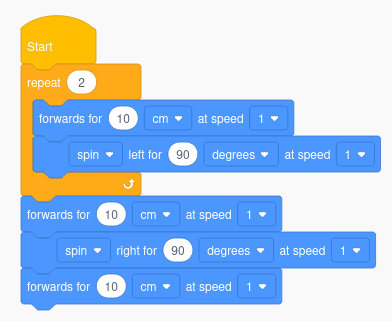
- Wir verwenden das Klammer-Symbol “repeat” (wiederholen) unterhalb Kategorie “Control” (Kontrollstruktur) und tragen den Wert 2 ein.
Jetzt erweitere dein Fahrprogramm um das Blinken.
- Baue deine Erfahrungen aus dem vorherigen “Blinken-Experiment” in das Fahrprogramm ein. Vor dem Abbiegen soll der Roboter dreimal auf der Seite blinken, zu der er abbiegen wird.
- Stelle deinen Edison auf die ausgedruckte Grafik und prüfe, ob er den Kurs abfährt und dabei blinkt.
Mit diesem Programm fährt und blinkt unser Roboter wie gewünscht:
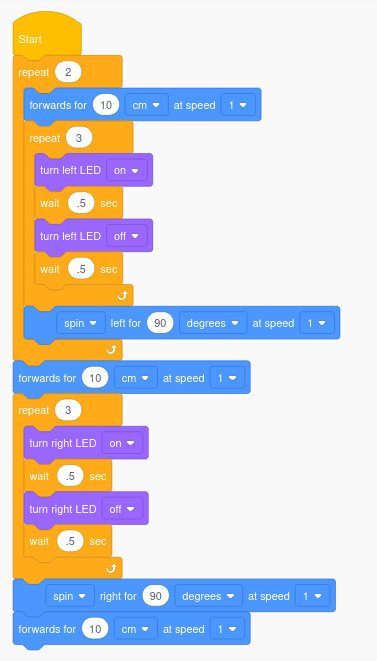
Wir haben einfach die Befehlsfolgen für das Blinken vor dem Abbiegen eingefügt.
Teste unser Programm:
- Lade edison_verkehrueb.ees herunter.
- Wähle das Zielverzeichnis “Downloads”.
- In der EdScratch-App gehe auf “Menu > Load from Computer”. Wähle aus dem Verzeichnis “Downloads” die Datei “edison_verkehrueb.ees”.
Was du bei diesem Projekt lernen kannst:
- Der Text in einem EdScratch-Block beschreibt die Bedeutung des Befehls. Bei manchen Befehlen kannst du Eingaben machen oder verschiedene Optionen auswählen.
- EdScratch bietet verschiedene Möglichkeiten um Kurven zu fahren. In einem EdScratch-Block kannst du festlegen, ob der Roboter auf der Stelle drehen (spin) soll, ob er eine Kurve nach vorn (turn forwards) oder nach hinten (turn backwards) fahren soll. Bei Kurvenfahrten (turn forwards/backwards) dreht das Rad auf der Kurvenaußenseite um das stehende innere Rad. Beim Drehen (spin left/right) drehen die Räder in entgegengesetzte Richtungen.
- In EdScratch gibt es eine einfache Möglichkeit, Anweisungen in einer bestimmten Anzahl zu wiederholen. Programmierer nennen das eine “Schleife“. Wir verwenden hier ein Klammer-Symbol mit dem Text “repeat” (wiederholen) und einem Zahlenwert. Alle Anweisungen innerhalb der Klammer werden so oft wiederholt, wie der Zahlenwert angibt.
- Edison ist ein günstiger Roboter und kein teures Präzisionsgerät. Deshalb kann es zu kleinen Abweichungen beim Fahren kommen.
