DAS PROJEKT
Im EdBlocks-Projekt “EINER LINIE FOLGEN” geht es um eine spezielle Aufgabe für fahrende Roboter. Dabei wird der Roboter so programmiert, dass er eine dunkle Linie erkennt und an ihr entlang fährt. Für die Linienerkennung benötigt ein Roboter besondere elektronische Bauteile, die wir unten beschreiben. Edison hat diese Bauteile. Darüber hinaus muss er so programmiert werden, dass er an der Linie entlang fährt.
DEINE MISSION
Untersuche die Unterseite von Edison:
- Kannst du die elektronischen Bauteile erkennen, die Edison zur Linienerkennung verwendet?
- Wie setzt Edison diese Bauteile ein, um eine dunkle von einer hellen Fläche zu unterscheiden?

Tipp: Die Lösung hat etwas mit Licht zu tun!
Lösung:Edison besitzt auf der Unterseite eine rote LED und einen Lichtsensor. Die rote LED befindet sich direkt unter dem Gleitstück. Unterhalb der roten LED ist ein Lichtsensor eingebaut.
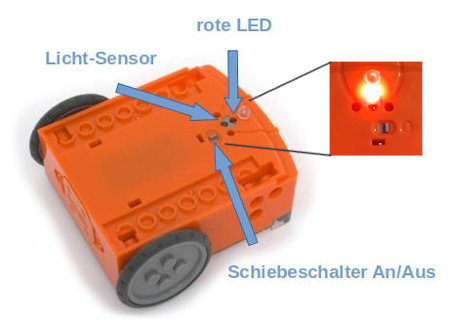
Der Roboter strahlt mit der roten LED den Boden an und der Lichtsensor stellt fest, ob viel oder wenig Licht vom Boden reflektiert wird. Ein heller Untergrund reflektiert viel und ein dunkler Untergrund wenig Licht. Kurzum, die schwarze Linie reflektiert wenig Licht und das stellt der Roboter fest.
Mittels der LED und des Lichtsensors kann Edison auch Barcodes lesen. Außerdem verwendet er den Lichtsensor, um die Lichtsignale vom EdComm-Kabel zu empfangen.
Erstelle mit EdBlocks ein Programm für Edison:
- Edison soll mit langsamer Geschwindigkeit fahren.
- Der Roboter soll einer Linie für 15 Sekunden folgen. Miss die Fahrdauer beim Testen mit einer Stoppuhr.
Falls du unsicher bist, wie du Programme erstellst und auf Edison lädst, siehe unser Video auf der Seite EDISON – PROGRAMMIEREN MIT EDBLOCKS.
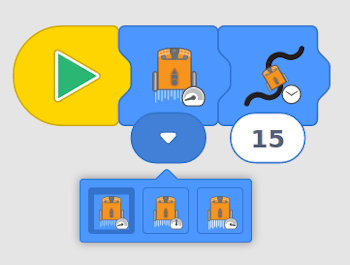
Lösungsvorschlag:So folgen wir der Linie mit langsamer Fahrt:
Hinweise zu den Symbolblöcken:
- Du findest beide Symbole unter Kategorie “Drive” (Fahren)
- Zuerst stellst du mit Symbol “Set drive speed to …” (Stelle die Fahrgeschwindigkeit auf…) die Fahrgeschwindigkeit ein. Klicke auf den Pfeil nach unten und wähle in der Auswahl “Set drive speed to slow” (Stelle die Fahrgeschwindigkeit auf langsam).
- Das Linienfolgen aktivierst du mit Symbol “Follow a line for n seconds”. Hier gibst du die Zeitdauer 15 Sekunden ein.
Unser Edison ist genau 15 Sekunden gefahren.
Teste unser Programm edison_liniefolgen.eeb.
Experimentiere mit Edison:
- Bereite die Testfahrten mit einer der folgenden Möglichkeiten vor:
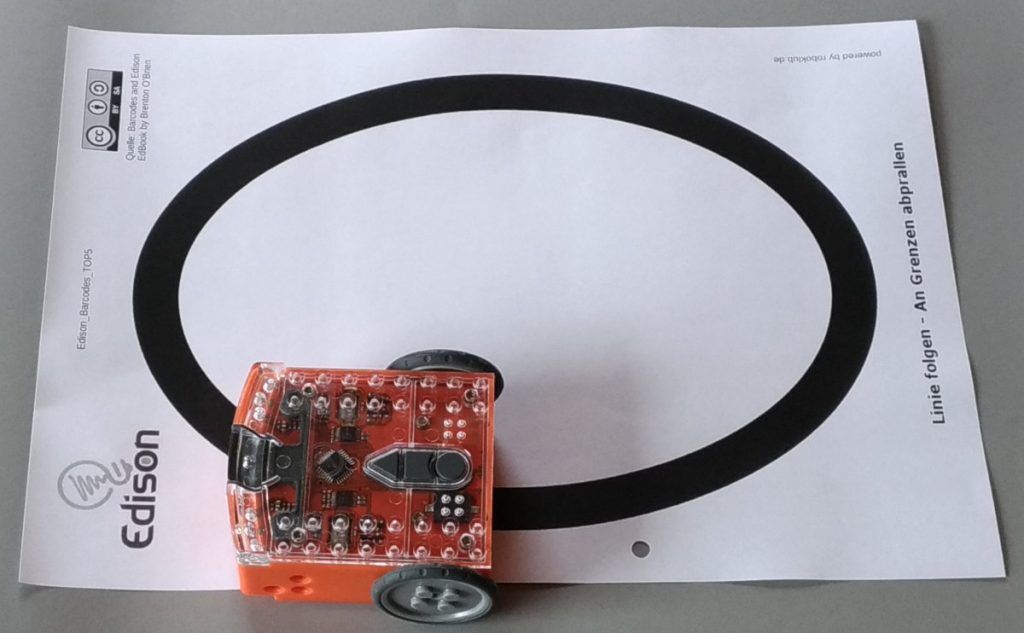
– entweder lade dir unser Dokument Edison Barcodes TOP 5 herunter und drucke die erste Seite aus (enthält eine Teststrecke).
– oder setze eine Edison-Aktivitätsmatte ein (siehe Edison-Aktivitätsmatte als PDF-Datei).
– oder klebe einen geschlossenen Kreis oder ein Oval mit schwarzem Klebeband auf eine helle Unterlage. - Setze Edison direkt neben die Linie und starte dein erstelltes Programm. Wie sieht es aus, wenn Edison an der Linie entlang fährt?
- Setze Edison auf eine helle Unterlage, weit entfernt von der Linie. Wie fährt Edison jetzt?
- Ändere die Fahrgeschwindigkeit auf schnell. Wie ändert sich die Fahrt?
Edison startet mit einer Kurvenfahrt. Er fährt eine Rechtskurve, bis er eine schwarze Linie gefunden hat. Während Edison an der Linie entlang fährt, wackelt er hin und her. Die Kurvenfahrt und das Wackeln haben vermutlich mit dem Symbolblock “Follow a line for n seconds” (Folge einer Linie für n Sekunden) zu tun. Wir kennen allerdings nicht die genauen Befehle, die sich hinter dem Symbolblock verbergen.
Wenn die Fahrgeschwindigkeit geändert wird, fährt der Edison natürlich schneller. Die Zeitdauer von 15 Sekunden für die Linienfahrt ändert sich nicht. Allerdings fährt der Roboter eine längere Strecke innerhalb der 15 Sekunden. Außerdem kann die schnelle Fahrt dazu führen, dass die Linienerkennung nicht so gut funktioniert. Edison fährt dann Rechtskurven und sucht die Linie.
Was du bei diesem Projekt lernen kannst:
- Edison besitzt auf der Unterseite eine rote LED und einen Lichtsensor. Der Roboter strahlt mit der roten LED den Boden an und der Lichtsensor stellt fest, ob viel oder wenig Licht vom Boden reflektiert wird. Ein heller Untergrund reflektiert viel und ein dunkler Untergrund wenig Licht. Der Roboter erkennt die schwarze Linie, weil sie wenig Licht reflektiert.
- Für das Einstellen der Fahrgeschwindigkeit und dem Folgen einer Linie gibt es in EdBlocks entsprechende Symbole.
- Hinter dem Symbol “Follow a line for n seconds” verbergen sich mehrere Aktionen. Edison fährt Rechtskurven, bis er eine Linie gefunden hat. Wenn der Roboter an einer Linie entlang fährt, wackelt er hin und her. Die einzelnen Fahrbefehle dazu werden uns nicht angezeigt.
- Die Geschwindigkeit gibt an, welche Strecke der Roboter innerhalb einer bestimmten Zeitdauer zurücklegt. Wenn schnelle Geschwindigkeit eingestellt ist, legt der Roboter eine weitere Strecke innerhalb des Zeitraums von 15 Sekunden zurück, als bei “langsamer” oder “normaler” Geschwindigkeit.
