
EINLEITUNG
MOTOREN EINSTELLEN
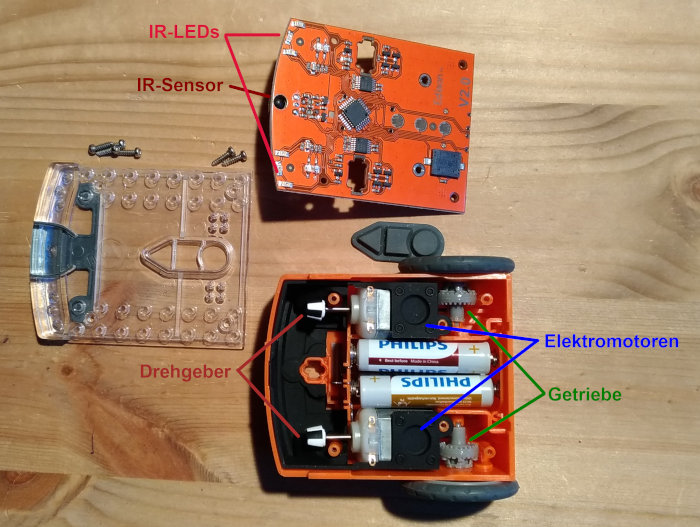
Der Edison-Roboter wird durch zwei Elektromotoren mit Getriebe über die Antriebsräder angetrieben. Manchmal fährt Edison in einem leichten Bogen, statt geradeaus zu fahren. Das bedeutet, der rechte und der linke Motor laufen ungleich. Dann kannst du die Motoren des Edison durch ein internes Programm, das eine sogenannte Kalibrierung durchführt, wieder einstellen.
Willst du mehr wissen...Es ist schwierig, einen Roboter mit Getriebemotoren genau geradeaus fahren zu lassen oder präzise Kurven zu fahren. Das liegt an dem Spiel im Getriebe, am Schlupf der Räder und das jeder Motor und jedes Getriebe leicht unterschiedlich sind. Außerdem reagieren Elektromotoren nicht sofort, wenn der Strom verändert wird. Damit das Robotergehirn weiß, wie weit sich ein Motor gedreht hat, benötigt es einen Sensor, der die Umdrehungen zählen. Diesen Sensor nennt man auch Drehgeber. Ein Teil des Drehgebers ist beim Edison auf der Motorachse angebracht. Es handelt sich um einen kegelförmigen Aufsatz mit hellen und dunklen Feldern. Die Felder werden von einer LED beleuchtet. Ein Lichtsensor stellt die reflektierenden hellen Felder fest und leitet diese Impulse zum Zählen an das Robotergehirn.
Beim Kalibrieren fährt der Roboter zehnmal vor und zurück. Für jede Fahrt wird die Zeitdauer und Geschwindigkeit festgelegt. Dabei vergleicht das Robotergehirn über die Drehgeber, wie viel Umdrehungen der linke und der rechte Motor gemacht haben. So werden Unterschiede festgestellt und die Motoren werden danach so angesteuert, dass sie links und rechts gleich drehen. (Auskunft Microbric Support 12.2020).
HINDERNISERKENNUNG EINSTELLEN
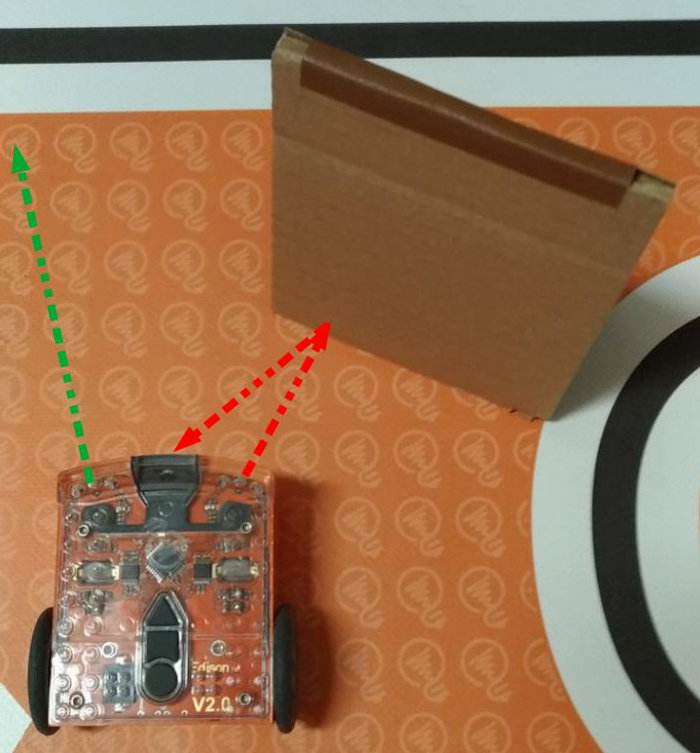
Es kommt auch vor, dass die Hinderniserkennung nicht so funktioniert, wie du es erwartest. Dann erkennt Edison das Hindernis nicht und fährt hinein, oder er erkennt es zu früh und führt vorzeitig Aktionen aus. Auch die Hinderniserkennung kannst du über ein internes Kalibrierungsprogramm einstellen. Achte darauf, dass deine Hindernisse mindestens 15 cm hoch und hell sind, denn dann reflektieren sie das Infrarotlicht (IR-Licht) gut. Mit transparenten oder sehr dunklen Hindernissen und bei starkem Sonnenlicht wirst du Probleme haben.
Zur Hinderniserkennung verwendet Edison zwei IR-LEDs links und rechts, sowie einen IR-Empfänger in der Mitte. Die IR-LEDs senden unsichtbares Infrarotlicht aus. Wird das IR-Licht von einem Hindernis reflektiert, erkennt der Edison das mit seinem IR-Empfänger. Die LEDs leuchten abwechselnd. Es leuchtet die linke LED, dann die rechte, dann wieder die linke und so weiter. Das passiert in einem sehr schnellen Wechsel. Das Robotergehirn weiß zu einem Zeitpunkt immer, welche IR-LED gerade leuchtet. Wenn also die linke IR-LED leuchtet und der IR-Empfänger Infrarotlicht empfängt, dann weiß das Robotergehirn, dass links ein Hindernis steht. Beim Kalibrieren der Hinderniserkennung stellst du die Empfindlichkeit ein, mit der der IR-Empfänger das reflektierte Infrarotlicht erkennt (Auskunft Microbric Support 01.2021).
Du startest das Kalibrieren der Motoren und der Hinderniserkennung über Barcodes. Wie das funktioniert, zeigen wir dir unten.
WERKZEUGE & MATERIALIEN

- Lade eines der folgenden Dokumente herunter und drucke es aus:
– Edison Motoren/Hinderniserkennung Kalibrierung
– Complete Barcode List (von der Website des Herstellers)
MACHEN
MOTOREN KALIBRIEREN
- 1.) Stelle Edison rechts vom Barcode auf.
- 2.) Drücke 3x die runde Programmiertaste.
Edison liest den Barcode ein. - 3.) Drücke 2x die dreieckige Starttaste.
Edison fährt 10x vor und zurück und stellt dabei die Motoren ein.
HINDERNISERKENNUNG KALIBRIEREN
- 1.) Stelle Edison rechts vom Barcode auf.
- 2.) Drücke 3x die runde Programmiertaste.
Edison liest darauf den Barcode ein. - 3.) Stelle ein Hindernis in gewünschtem Abstand (z.B. 30 cm) vor den Roboter.
- 4.) Drücke 1x die dreieckige Starttaste.
Zuerst wird die linke Seite, dann die rechte Seite kalibriert. - 5.) Drücke die dreieckige Starttaste so oft drücken, bis die LED flackert. Drücke die runde Programmiertaste, bis die LED erlischt. Die LED flackert, wenn ein Hindernis erkannt wird.
- 6.) Drücke die viereckige Stopptaste zum Speichern der Einstellung.
- 7.) Zum Einstellen der rechten Seite wiederhole die Punkte 5 und 6.

Wir haben festgestellt, dass diese Hinderniserkennung mit Infrarotlicht ziemlich ungenau ist. Einigermaßen brauchbare Ergebnisse erhielten wir, wenn wir bei der Einstellung etwas über 30 cm vom Hindernis entfernt waren.
